| Application | Dynamic Inclinometer 2-Axes with Pitch and Roll |
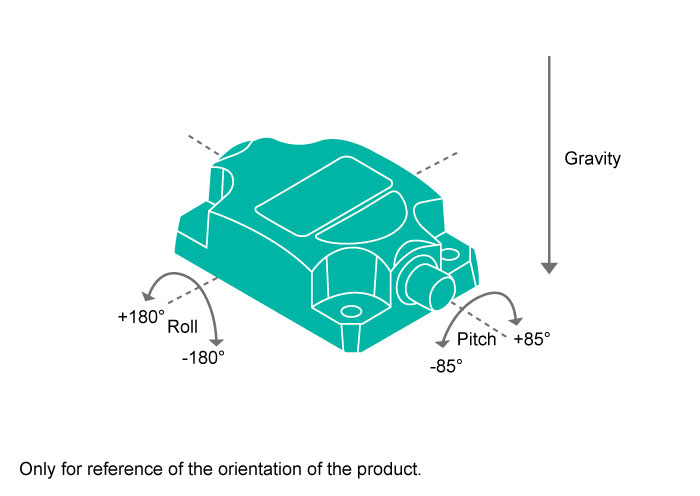
| Plage de mesure | Pitch ± 85°, Roll ± 180° |
| Précision (INL) | ±0,30° |
| Résolution | 0,01° |
| Répétabilité | ≤0.05° |
| Précision dynamique | ±0.50° |
| Temps de cycle (capteur primaire) | 1 ms |
| Hystérésis | ≤0.05° |
| Device Orientation | Horizontal |
| Plage de mesure Accéléromètre | ±8 g |
| Plage de mesure Gyroscope | ±1000 °/s |
| Tension d'alimentation | 9 – 30 VDC |
| Consommation de courant | ≤ 65 mA @ 10 V DC, ≤ 60 mA @ 24 V DC |
| EMC: Emission d'interférences | DIN EN 61000-6-4 |
| EMC: Immunité au bruit | DIN EN 61000-6-2 |
| EMC : Automobile | E1 ECE - R 10, 07; EN 13309:2010-12; EN 13766-1:2019-04; |
| Protection en inversion de polarité | Oui |
| Protection contre les courts-circuits | Oui |
| MTTF | 440 years @ 40 °C |
| Min Temperature | - 40 °C (- 40 °F) |
| Max Temperature | +85 °C (+185 °F) |
| Température de stockage | -40 °C (-40 °F) – +85 °C (+185 °F) |
| Gradient de température | 0.008°/ K |
| Gradient de température | 0.008°/ K |
| Classe de protection (boîtier) | IP68/IP69K |
| Résistance aux chocs | ≤ 100 g (demi-sinus 6 ms, EN 60068-2-27) |
| Résistance aux vibrations | 1,5 mm (10 Hz – 58 Hz) & ≤ 20 g (58 Hz to 2000 Hz) |
| Matériau du boîtier | Zinc |
| Matériau revêtement | None |
| Poids | 290 g (0.64 lb) |
| Interface | J1939 |
| Temps de stabilisation | min 30 ms; default 200 ms (dependent on filter settings) |
| Pilote de sortie | Émetteur-récepteur (ISO 11898) |
| Vitesse de transmission | 125 kBaud, 250 kBaud, 500 kBaud |
| Vitesse de transmission par défaut | 250 kBaud |
| ID de Nœud par défaut | C0h |
| Default PGN | PGN 65280 (tangage, roulis, accélération x, accélération y) + PGN 65281 (accélération z, moment x, moment y, moment z) |
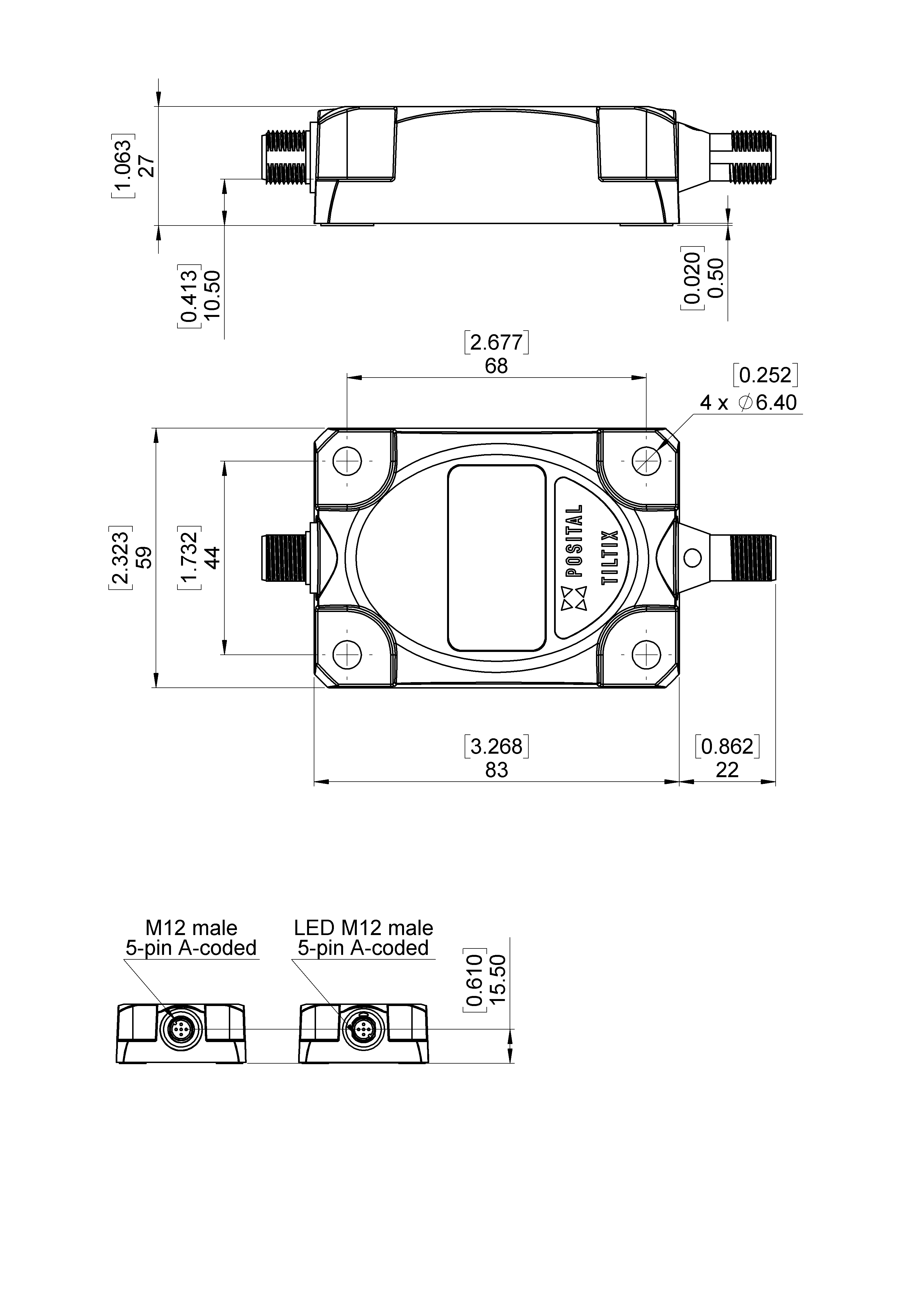
| Découpe de panneau | Connector 2 x M12 (CAN) Male+Male |
| Raccordement 1 | M12, Male, 5 pin, a coded |
| Raccordement 2 | M12, Male, 5 pin, a coded |
| Cycle de vie des produits | Nouveau |
| Approval | CE |

| Signal | Connecteur | Numéro de broche |
|---|---|---|
| Power Supply | 1 | 2 |
| GND | 1 | 3 |
| CAN High | 1 | 4 |
| CAN Low | 1 | 5 |
| Not Connected | 1 | 1 |
| Power Supply | 2 | 2 |
| GND | 2 | 3 |
| CAN High | 2 | 4 |
| CAN Low | 2 | 5 |
| Not Connected | 2 | 1 |