ステッパーモータ用の低価格のKitエンコーダがご利用できます。
予算により位置制御ができます。
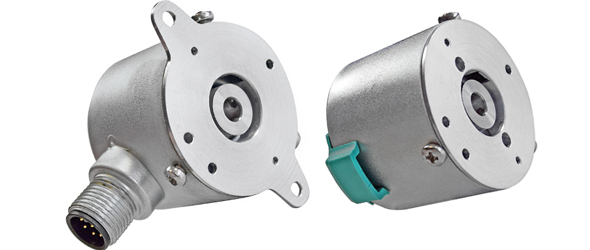
- 他のメーカーのインクリメンタルキットエンコーダのような同じインターフェースを持った新しいモデル。
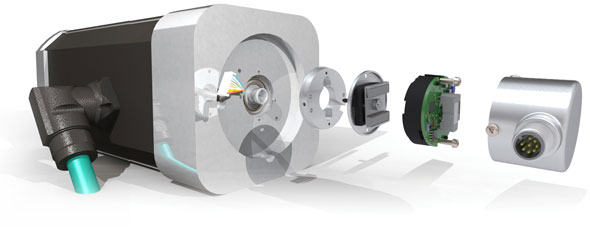
- 簡単なアップグレードのための交換時の互換性と同一の組立手順
- SSIとBissCの通信インタフェースを持ち、
- 4mmから10mmまでの様々なハブ径については、クロスリファレンスガイドを参照してください。
- POSITALのアブソリュートキットエンコーダ技術に基づいて - バッテリレス、ギアなし
- 光技術よりもすぐれた磁気技術
- M12コネクタの追加による接続性の向上
POSITALキットエンコーダは回転数を含めた正確な位置情報を提供し、これによりコントロールシステムは対象となる機械部品の完璧な位置情報を常に監視することができます。POSITAL社でロボット工学系マーケティングを専門とするJim Stevens は、「多回転数を含む絶対的位置情報(アブソリュートポジション)のフィードバックは正確な位置コントロールを可能にする自然な方法である」と述べます。「ほとんど全ての位置情報フィードバックにおけるアプリケーションは多回転数を必要とします。昨今の多くのシステムにはインクリメンタルエンコーダが使われていますが、これは単に歴史的に、インクリメンタル情報(回転数を伴わない回転角度のみの位置情報)のフィードバック機器が、アブソリュート情報までをフィードバック可能とする機器に比べ非常に安価だったためです」。しかしながら、POSITAL社が提案するアブソリュートキットエンコーダは、インクリメンタルエンコーダに劣らず安価であり、アブソリュート情報を必要とする現場でシステムデザイナーが、これ以上インクリメンタル情報の持つ欠点に悩まされる必要はありません。
インクリメンタルエンコーダは速度コントロールに対してとても有効です。しかし、絶対位置を監視するために、コントローラは、エンコーダに完璧なパルス数の出力を要求する必要があります。これが問題となります。例えば、パルスカウントが停電などによって失われた場合や、機械が動くなどでコントロールシステムがパルスカウントの更新に失敗した場合、位置情報の正確さは失われてしまいます。通常とられる解決策は機械位置の「リセット」で、既知のポジションにパルスカウントを戻し、数え上げを再度ゼロよりリスタートさせるというものです。一方で、アブソリュートエンコーダは位置情報を直接計測します。停電の後には、コントローラは単にセンサーを参照し回転位置情報を得ることで、機械部品の完全な位置情報を再構築することができます。
多回転アブソリュートキットエンコーダは確実なソリューションを提供します。
多回転アブソリュートキットエンコーダ POSITAL社の多回転アブソリュートキットエンコーダは、確実なエンコーダソリューションを提供することのできる磁気センサーテクノロジーを採用しています。多回転の数え上げシステムはWiegandワイヤーによる電力供給技術が用いられています。これにより、エンコーダは電源サイクル時における正確な絶対位置および電源オフ時におけるエンコーダの回転の維持が可能になります。
With17ビット(131072個位置分)の単回転分解能と16ビット(65526回転分)の多回転レンジをも持つPOSITAL社のKCD アブソリュートキットエンコーダは、位置コントロールを伴うアプリケーションに最適です。