傾斜計に使用されるMEMSの計測原理
傾斜計に使用されるMEMSの計測原理
傾斜計は傾斜センサー、インクリノメーター、スロープセンサーとも呼ばれ、物体の重力に対する傾きを計測するものです。MEMS (Micro-Electro-Mechanical Systems)の製造技術が進化したことで、この種のセンサーは大衆市場に投入されるようになり、大幅なコストダウンが図られました。
この傾斜計の背後にある基本原理は、MEMS (Micro-Electro-Mechanical Systems) センサーセルであり、フルモード型ASICに内蔵されています。
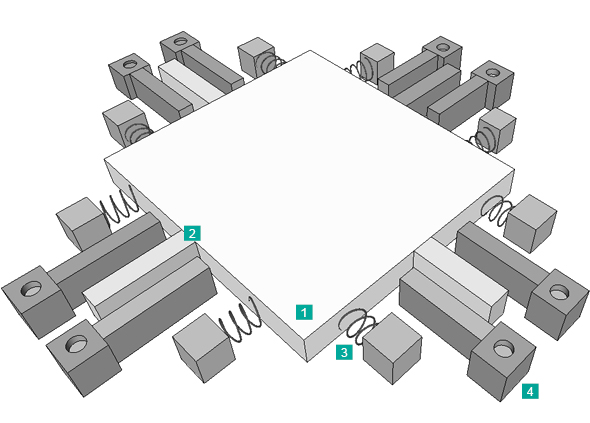
図1 MEMSセンサーの原理
![]() プルーフマス、および
プルーフマス、および ![]() 電極
電極 ![]() ばね
ばね![]() 固定電極
固定電極
機能は電極を2本のみにした略式モデルを使って簡単に説明します。電極の一方は固定され、もう一方は可動性で、スプリング部品 (図1) に接続されます。
傾斜計が水平に置かれている場合 (図2.1)、電極間の静電容量が計測されます。センサーが傾くと(図2.2)、可動電極が固定電極に呼応するように傾斜角度を変えます。これが2つの電極間の静電容量の変化となり、センサーセルが計測します。静電容量の変化は対応する傾斜値に変換されます。
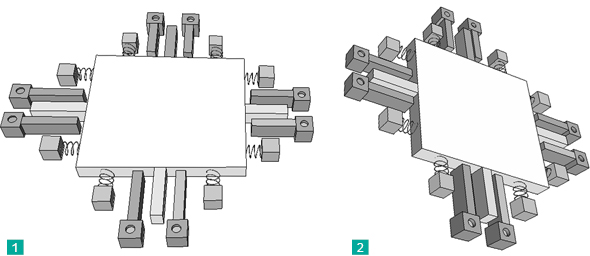
図 2 MEMSセンサーのポジション
![]() 水平に置かれた状態のMEMSセンサー
水平に置かれた状態のMEMSセンサー![]() 傾いた状態のMEMSセンサー
傾いた状態のMEMSセンサー
動作原理は、携帯電話の人感センサーや自動車のエアバッグなど、工業用・商業用にすでに様々に応用されているMEMS加速度計と同様です。一般消費者向け用途には、低分解能の加速度計で十分とされ、通常1°未満程度です。このように低分解能で十分とされる一般向け傾斜計とは対照的に、TILTIX傾斜計のMEMSセンサーは精密な電極が配列され、さらに正確に分析できます。
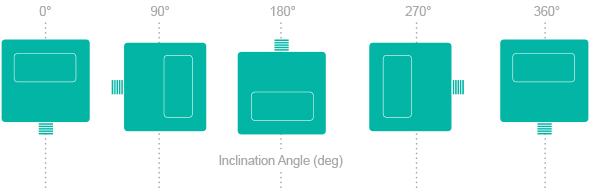
TILTIXシリーズの傾斜計は、2種類を提供でき、1つは傾斜角0~360°対応 (時計回り・反時計回りとも) の一軸測定タイプで、もう 1つは、±80°の傾斜に対応する2軸測定タイプです。
静的傾斜計の限界
強い衝撃や振動が起こる場合、傾斜計の物理的ダンピングだけでは、その衝撃・振動を抑えために十分ではないでしょう。ソフトウェアーフィルタは限られた範囲でのみでしかそのような外乱を減らすことが出来ません。静的TILTIX傾斜計では、「移動平均」もしくは「指数的」フィルタが作動し、シグナルを滑らかにします。しかし、MEMS傾斜計の持つ速い反応時間が失われ、センサーの応答が遅くなるという欠点があります。
強い加速度を伴う動的な動きに対しては、POSITALのDynamic TILTIX傾斜計を使用する必要があります。これらは物理的なダンピングを使用しない別の技術に基づいているため、安定性と応答時間の間にトレードオフはありません。
動的傾斜計
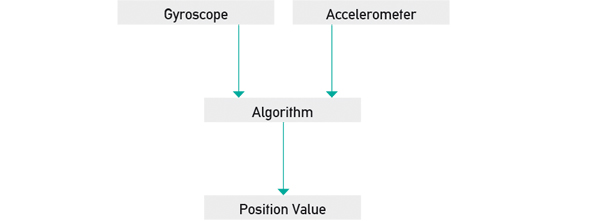
突発的な動き、衝撃、振動に遭遇する可能性があるアプリケーションでは、応答が速く、信号出力がきれいなセンサーを使用することが重要です。 POSITALの動的傾斜計は、3D加速度センサーと3Dジャイロスコープという2つの異なるMEMSセンサーを使用して、2つの測定原理を組み合わせています。 3D加速度センサーは(静的傾斜計で使用されるユニットとは異なり)減衰されず、急激な動的動作に追従することができます。 同時に、3Dジャイロスコープは、慣性の法則に基づいて回転速度を測定します。 加速度計とジャイロスコープからの信号を組み合わせて、加速度の影響を完全に補償する傾斜測定を行います。 結果として、動的なTILTIX傾斜計は、建設機械、鉱山機器、クレーン、ロボット技術などへのモバイル機器に確実に使用できます。
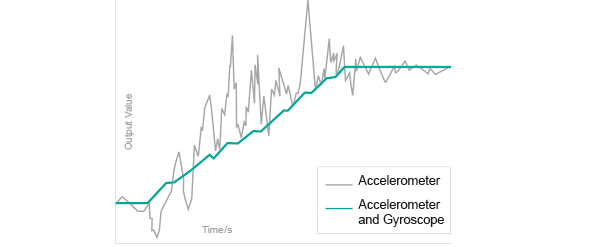
以下の図では、従来の静的な傾斜計の出力とジャイロスコープを備えた動的な傾斜計の性能を、強い衝撃と振動を伴うような動的な運動の下で比較しています
稼働中のパワーシャベルの実測定角度
精確な結果を引き出す革新的アルゴリズム
加速度計は傾斜位置を測定し、ジャイロスコープは回転速度を測定します。 加速度は加速度計に大きな影響を与えますが、ジャイロスコープの測定回転数には限定的な影響しかありません。 革新的なアルゴリズムは、両方の信号を組み合わせ、各センサーより最適な値を出力します。 このようにしてセンサーは、外部加速度によって得られた誤差から実際の位置情報を抽出することができます。
範囲と取り付けオプション
TILTIXシリーズの傾斜計は2種類あります。
1. 水平取り付けに使用される二軸センサー。 このバージョンには、X軸用とY軸用の2つの出力があります。 各軸は、重力場に対する傾斜角を示します。
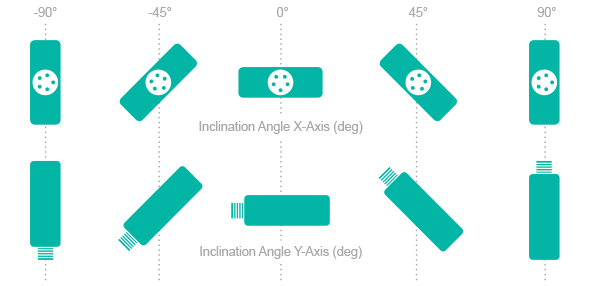
2. 1軸出力の垂直取り付け用の1軸傾斜測定バージョン。
動的傾斜計の追加機能
動的傾斜計の主な目的は、センサーパラメータの設定を全くせずに、傾斜角度に対して安定したデータを提供することです。 しかし、CANopenインタフェースを備えたダイナミックな傾斜計では、3つの軸のそれぞれに対して加速力(加速度計)と回転速度(ジャイロスコープ)を別々に出力することができます。 これらの測定値は、マッピング可能なCANopenオブジェクトに保存されます。
一つまたは複数の軸に沿った加速力のモニターをすることで、コントローラ側に追加機能または安全機能を実装することができます。 コントローラは、一定の加速度閾値を超えたときに機械を停止させることができます。また、X軸の回転速度に関する追加情報を使用することで、機械の水平(ヨー)回転を測定してモニターすることができます。この追加情報をどのように使用するかは、機械設計者またはシステムインテグレーターが決定することができます。
MEMSセンサーシップの製造
マイクロ・エレクトロ・メカニカル・システム(MEMS)デバイスの製造進歩により、これらの種類のセンサーは優れた性能またはコスト比を有する大衆市場製品となっています。 TILTIX傾斜計の基本測定内容は、完全にカプセル化されたASICに埋め込まれたMEMSセンサーセルです。
共通仕様
センサーサイクル時間: これはベースセンサーの内部サイクル時間です。 5msのサイクル時間は、位置値が5msごとに更新されることを意味します。
インターフェースサイクル時間: これは、通信インタフェースを介して位置情報が送信されるサイクルタイムです。センサーサイクル時間(固定値)とは対照的に、インターフェースサイクル時間は、インタフェースレベルでお客様が容易に調整することができます。
絶対精度: 絶対精度は、測定された位置と定義された範囲内の実際の位置との間の最悪の場合の偏差です。
オフセット: 傾斜計がゼロレベルに置かれているとき、出力は小さな偏差を示します。ゼロレベルでのこのエラーは、オフセット・エラーと呼ばれます。
ダイナミック精度: この精度は、デバイスが外部の振動や加速度に晒されているという点を除き、絶対精度と同じ方法で決定されます。ダイナミック精度は、モバイル機器の移動環境をシミュレートするさまざまな機器上のラボテスト中に決定されました。記載された動的精度は基準値としての役割を果たします。マシンごとに振動や衝撃が異なるため、お使いのマシンの動的挙動を評価することをお勧めします。試験は以下の装置で実施されました。
- リニア加速度:センサーは1軸あたり1秒間で10m /s²加速されます
- 振動:1 gの力を伴う1~1000 Hzの異なる振動周波数
分解能: これは取りうる最小ステップです
ヒステリシス: ヒステリシスの定義は、システムの出力値が実際の入力に依存するだけでなく、過去の入力にも依存するということです。 傾斜計の場合、これは、測定された傾斜角もまた過去の位置に依存することを意味します。 傾斜計が0°から10°まで、または20°から10°までに傾斜しているかどうかには、わずかな違いがあります。 この差がヒステリシスによって表現されます。
温度勾配: この値は、温度変化に対する測定された傾斜角の変化を表します。 傾斜計が静止位置にあり、温度が低下または上昇する場合、出力値も温度勾配に従って変化します。
整定時間: これはシステムの動的挙動を記述する値です。 整定時間は、傾斜計信号が到達して最終位置の5%以内に留まる必要がある時間を定義します。
